





Ez a menetpróba elég rendhagyó módon zajlott, tudniillik menet közben senki sem vezetett! Ugyanis a null emissziós elektromos autó után a Nissan következő ambiciózus célkitűzése, hogy 2020-ra megvalósítsa a kereskedelmi forgalomban is kapható, önmagát vezető autót, mellyel a halálos és súlyos sérülésekkel járó közúti baleseteket kívánja a zéró irányába csökkenteni.
A japán mérnökök az „Aktív Biztonsági Pajzs” gyűjtőnév alatt futó, jelenleg is rendelkezésre álló radar és kamera alapú modern vezetéstámogató rendszereket (pl. sebesség- és követésitávolság-tartó automatika, holttérfigyelés, aktív sávtartó berendezés, ráfutásos balesetveszélyre figyelmeztetés és automatikus vészfékezés, tolatás közbeni ütközést megelőző rendszer, 360 fokos parkolókamera) az autó teljes környezetét figyelő lézeres letapogatással és távolságméréssel egészítették ki. Ez utóbbi érzékeli a többi járművet, az akadályokat és a potenciális veszélyforrásokat, továbbá felismeri az útburkolati jeleket, közlekedési lámpákat és táblákat. A mesterséges intelligenciával megfejelve pedig az automatizált vezetésű Nissan az embernél sokkal gyorsabban képes mérlegelni az adott forgalmi helyzetet, meghozni a döntést és reagálni a szituációra.
 Mitsuhiko Yamashita főmérnök az anyósülésen
Mitsuhiko Yamashita főmérnök az anyósülésen
Ügyesen végigcsinálta a szimulációt
Többféleképpen is demonstrálták az „önvezető autó” képességeit – a biztonság érdekében persze egy mérnököt ültettek a vezetőülésbe, de hozzá sem ért a kormányhoz vagy a pedálokhoz. A városi szakaszon először az irányjelző használatával kiállt a parkolóhelyről, majd a megengedett sebességre gyorsított, élesebb kanyarban biztonságos tempóra lassított, közben szép „folyékonyan” a sávban navigálva az autót. Valamivel összetettebb helyzet az amerikai négy STOP-táblás kereszteződés, ahol annak van elsőbbsége, aki hamarabb odaér. Az első körben megadta az elsőbbséget egy másik járműnek és áthaladt a kereszteződésen, a másodikban pedig indexelt és elkanyarodott a megfelelő sávba – a jobbkézszabály és egyebek csak programozás kérdése.
 Így „lát” a lézerszkenner és a nagy felbontású orrkamera
Így „lát” a lézerszkenner és a nagy felbontású orrkamera
Azután a parkolóhelyről belógott egy autó az útra: mivel érzékelte, hogy szemben egy másik jármű közeledik, előbb elengedte, majd az irányjelzőt aktiválva kikerülte. Az országúti demón a gyorsítósávból besorolt az autópályára, megelőzött egy lassan haladó autót, a sebességkorlátozó táblánál lassított és biztonságos távolságot tartott az útépítés miatti sávelhúzást imitáló bójáktól. A kihajtónál letérve megállt a piros lámpánál és zöldre elindult, amikor pedig két autó közül váratlanul kiugrott egy gyalogosbábu, villámgyors kikerülő manővert tett – amennyiben szemből vagy hátulról autót észlelt volna, vészfékezést hajt végre.
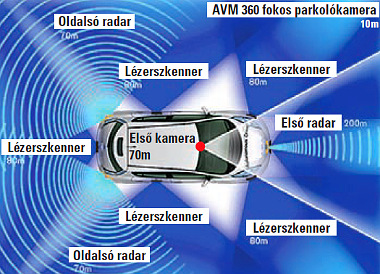 Kamerák, radarok és a lézeres letapogatás figyeli az autó 360 fokos környezetét. Ezek elemzése alapján hoz döntést a mesterséges intelligencia
Kamerák, radarok és a lézeres letapogatás figyeli az autó 360 fokos környezetét. Ezek elemzése alapján hoz döntést a mesterséges intelligencia
Az utolsó helyszín a bevásárlóközpontok parkolóit szimulálta. Emberünk a plázamakettnél kiszállt és a távirányítóval bezárta az autót: ekkor a kocsi megjegyezte a GPS-koordinátákat és automatikusan elindult parkolóhelyet keresni. Türelmesen megvárta, amíg egy másik autóval kitolatnak, előregurulva elemezte a parkolóhelyet, hogy nincs-e valamilyen akadály, majd betolatott – agresszív viselkedésre egyelőre nem készítették fel a rendszert, ha közben „lecsapnak” a helyre, az valószínűleg megzavarja. Mikor a „sofőr” végzett, megnyomta a távirányítón a hívógombot és a Leaf visszanavigált a kiindulópontra. Mondjuk gondban lett volna, ha tényleg nagybevásárlást tart, mert a prototípus csomagtartóját kitölti a szuperszámítógép. Persze a következő 7 évben a rendszer végső programozásával és a számítástechnika rohamos fejlődésével jelentősen csökken majd a helyigény, de addig a jogi környezetet és feltételeket is meg kell teremteni az automatizált vezetés számára.
Az Autó-Motor ott van a Facebookon is! Klikkelj ide, és lájkolj minket a legérdekesebb hírekért és a lappal kapcsolatos friss infókért!

