




Az önvezető autóknál az egyik legnehezebb feladat, hogy az pontosan felismerje a környezetét, még véletlenül se tévedjen el, mert annak katasztrofális következményei lehetnek. Az információgyűjtés egyfelől a fedélzeti érzékelőkre (kamerák és radarok) támaszkodik, másfelől a térképadatbázisra és azzal párhuzamosan műholdas helymeghatározásra. Azonban ez utóbbi nem mindig pontos, az USA fegyveres erői által fenntartott GPS hálózat civil jelének pontosságát gombnyomásra tudják rontani, de magas épületek is bezavarnak, arról nem is beszélve ha parkolóházba vagy alagútba hajt az autó, ahol megszűnik a jel vétele.
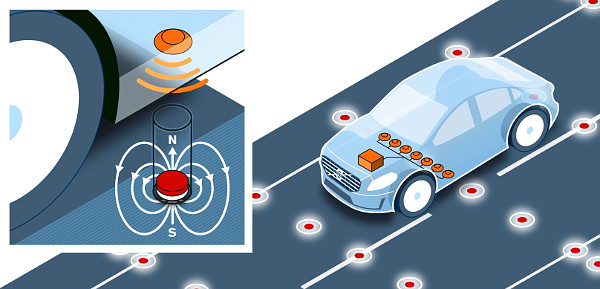
A Volvo most kitalált egy olyan megoldást, amely ilyen esetekben segíthet, mégpedig az aszfalt felülete alá 20 centivel, rendszeres időközökben elhelyezett mágnesek hálózatát. Ezek segítségével pontosan (kevesebb, mint 10 centi eltéréssel) tudná az autó, hol jár, még akkor is, ha az időjárási körülmények megakadályozzák a hagyományos érzékelők működését, például amikor a hótakaró miatt kamerával nem lehet érzékelni, pontosan hol ér véget az úttest autók számára fenntartott része, és hol kezdődik a járda. Ráadásul a mágneshálót parkolóházakban és mélygarázsokban is lehet telepíteni, megkönnyítve az autóknak a szűk helyen manőverezést/parkolást.

A mágneshálózat nem csak az önvezető autóknak segíthet, de például télen a hóeltakarítást végző járművek is automatikusan le tudják követni, meddig kell letakarítani az utat, nem kell többé megsérült tereptárgyaktól tartani. A Volvo már telepített egy ilyen kísérleti útszakaszt a próbapályáján, most azon dolgozik, hogy amikor pár év múlva egy 100 robotautós flottával megkezdik a technológia tesztelését Göteborgban, addigra már a közutakon – vagy magán-parkolóházakban – is legyenek ilyen mágneshálós útszakaszok.
Az Autó-Motor ott van a Facebookon is! Klikkelj ide, és lájkolj minket a legérdekesebb hírekért és a lappal kapcsolatos friss infókért!

